Inimese autojuhtimise võimekus on piiratud. Sõiduharjumuste ja -olude kombinatsioonis võib juhtida sõidukit inimene, kelle tähelepanu hajub ja kes väsib. Tänapäevaste autode juhiabisüsteemid ei väsi ja nende tähelepanu ei haju ehk need suudavad kanda sobilikes tingimustes ettenähtud osa sõiduülesandest. Olgu selleks vahetu auto juhtimine või siis ka ümbritseva jälgimine ning vajaliku teabe edastamine juhile.
Juhiabisüsteemide eesmärk on abistada (mitte asendada) juhti. Need võimaldavad osa sõiduülesandest anda süsteemile täitmiseks. Juhiabisüsteemid ei vastuta sõiduki juhtimise eest!
Juhiabisüsteemid on enamasti elektroonilised süsteemid, mis seovad andurid, täiturid ja tarkvara üheks terviklikuks vajalikku funktsionaalsust pakkuvaks süsteemiks. Oma olemuselt jagunevad juhiabisüsteemid erinevateks kategooriateks.
Sõiduki liikumist mõjutavad süsteemid jagunevad nende sõidu mõjutamise ulatuse osas suures plaanis kaheks:
- pikisõidusuunalist autojuhtimist (pidur, gaas);
- ristisõidusuunalist autojuhtimist (roolimine).
Nendeks abisüsteemideks on näiteks adaptiivne püsikiiruse hoidja (Adaptive Cruise Control – ACC), hädapidurdussüsteem (Automatic Emergency Braking – AEB), paigalseisu abi (Auto hold), mäkketõusu ja mäestlaskumise abisüsteem (Hill start/climb/descent assist), sõiduraja hoidmise süsteem (Lane Keep Assist – LKA), reavahetamise abisüsteeem (Lane Change Assist – LCA), parkimise abisüsteem (Park assist), sõiduki eemalt manööverdamise süsteem (Summon või Valet Parking funktsioon) ja autonoomse juhtimise süsteemid (Autonomous Driving - AD).
Kasutajaliidese abisüsteemid edastavad juhile teavet ümbritseva liiklusolude või sõiduki käitumisest kogutud teabe alusel. Edastavaks teabeks võivad olla audiovisuaalsed ja/või haptilised hoiatussignaalid, nagu näiteks rooli vibreerimine.
Hoiatussignaalid peavad olema selgesti mõistetavad ja eristatavad. Ekraani- või näidikute paneeli hoiatustulede puhul kasutatakse reeglina värvigammat, mille puhul rohelised või muud värvi teavitused on informatiivsed, kollased hoiatavad ja punased viitavad vahetule ohule. Samas ei tohi edastav teave juhti sõidukit juhtides häirida. Kasutajaliidese abisüsteemid on üldjuhul automaatse iseloomuga ja annavad juhile täiendavat infot erinevate olukordadega paremaks toimetulekuks.
Kasutajaliidese abisüsteemideks on näiteks pimedas nägemisulatust suurendav süsteem (Night vision), tuuleklaasi kuvar (Head Up Display - HUD), navigatsioonisüsteem (sh. reaalaja liiklusinfo), tagurduskaamera (sh 360 kraadi vaade), pimenurga jälgimissüsteem (Blind Spot Monitor – BSM), juhi erksuse tuvastamine (Driver drowsiness detection), kokkupõrke hoiatus (Forward Collision Warning - FCW), reast väljumise hoiatus (Lane Departure Warning - LDW), ristsuunalise liikluse hoiatus (Cross Traffic Alert – CTA; ristmik, parkimiskohalt välja tagurdamine), läheneva liikluse hoiatus (ukse avamisel tagant lähenev auto või rattur), vihmaandur (Rain sensor), rehvirõhu jälgimissüsteem (Tire Pressure Monitoring Süstem – TPMS), automaatsed kaugtuled (High Beam Assist) (sh. valgusvihu ositi juhtimisega), liiklusmärgi tuvastus, kaughaldussüsteem (auto avamine, kliimasüsteemi juhtimine, auto seisukorra jälgimine jmt) ja hädaabi kõne (E-call).
Et juhiabisüsteemid saaksid vajaliku informatsiooni töötlemiseks ning algoritmide tulemusel valminud otsused ellu viia, on vaja rakendada süsteemides andureid ja täitureid. Tänapäeva auto puhul pole tihti andurid enam ühe süsteemipõhised (näiteks ABS andur), vaid annavad mõõdetavat teavet edasi kas otse või mõne juhtmooduli kaudu andmevõrku. Samuti pole täituridki enam ühe süsteemi alluvuses, vaid erinevatest süsteemidest võivad tulla käsud mingi ülesande täitmiseks. Näiteks pidurite rakendamist võivad juhtida ABS, ESP, ACC või AEB, mida võimaldab täita pidurite hüdrauliline juhtmoodul (varasemalt nimetati seda ABS mooduliks).
Autot ümbritsevat keskkonda mõõtvad andurid:
- radar (lühi- (< 25 m), kesk- (25-75 m) ja pikamaa (kuni 250 m); esi-, taga- ja külgsuunas);
- kaamera (esi- ja tagasuunas, stereo, 360 kraadi, infrapuna);
- ultraheli;
- lidar.
Juhi sisendit mõõtvad andurid:
- juhi asendi andurid (salongikaamera, istmete kaaluandurid, salongiandurid ja muud);
- piduri- ja gaasipedaali asendi andurid, käiguvalits (käigukang või -nupp), rooliasendiandur, kiirendusandurid;
- tulede lüliti (automaatkaugtuled);
- kasutajaliidese (Human machine interface) juhtnupud süsteemides navigeerimiseks ja seadistamiseks;
- kaughaldusseadmed (nutiseade, kahesuunaline pult);
- e-call lüliti.
Täiturid:
- veojõu- ja pidurisüsteemid;
- elektriline rooliajam;
- näidikute paneel, keskkonsooli ekraan, HUD;
- helisignaali kõlar;
- haptilise tagasiside täiturid (näiteks roolivibraator);
- antennid (traadita side moodulid).
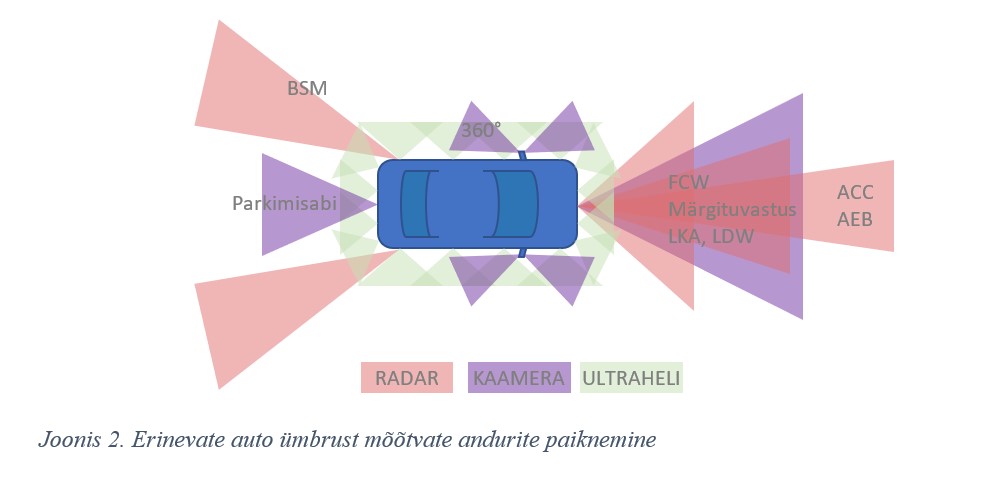
Sõiduki ümber toimuvat tuvastavad peamised juhiabisüsteemid on radar, kaamera ja ultraheliandurid. Lidarid ei ole veel jõudnud laiatarbe sõidukiteni oma hinna tõttu. Üks lidar maksab suurusjärgus 10 000 eurot, kuid tihti kasutatakse autonoomse juhtimisvõimekusega juhiabisüsteemide arendamisel ühel autol nelja lidarit, seega oleks ainuüksi andurtehnika hind ühe auto kohta juba uue keskklassi auto hinna vääriline.
Radariga mõõdetakse ees, küljel ja/või taga paiknevate objektide kaugust ja suhtelist kiirust, kasutades selleks raadiolaineid. Radar saadab välja raadiolained ning nende tagasipeegeldumise aja kaudu saadakse teada vahemaa. Tagasipeegeldenud raadiolaine sageduse muutuse korral on võimalik arvutada ka objekti suhteline kiirus. Kasutatavad radarilaine sagedused jäävad 24 GHz (lühimaa radar, kuni 70 m) ning 77 GHz (pikamaa radar, kuni 250 m) vahemikku. Radari eelis valguslainetel põhinevate andurite (kaamera, lidar) on, et see toimib ka kehvemate ilmastiku tingimuste korral nagu vihm, udu, lumesadu jmt.
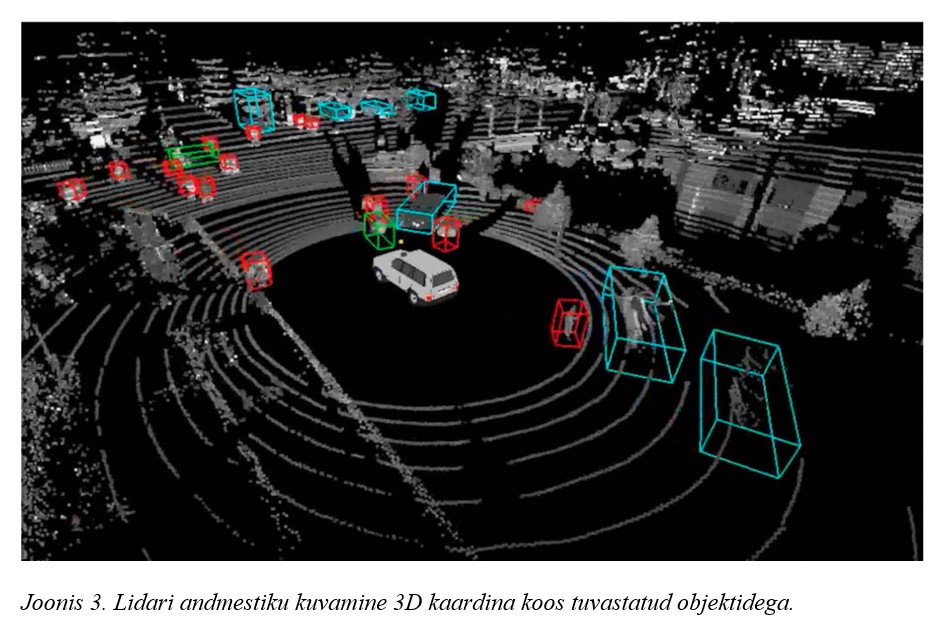
Lidar sarnaneb paljuski radarile, kuid erinevus seisneb kasutatavas elektromagnetlaine sageduses – välja saadetakse infrapuna- või ultraviolettvalgusimpulsse, mis jäävad inimsilmale nähtamatuks. Lidariga suudetakse küll autot ümbritsev maailm detailsemalt kaardistada, kuid on samas ka oluliselt tundlikum ilmastikuoludele, nagu lenduvad puulehed, lumesadu, otsene päikesevalgus ja udu.
Kaamerapõhiste süsteemide puhul registreeritakse pilt tavapäraselt sagedusega 30 kaadrit sekundis ühe või mitme kaamera poolt ning edastatakse vastavasse juhtmoodulisse töötlemisele. Ka kaamerasüsteemid võivad töötada väljaspool inimnägemisvõimekuse piire, kus näiteks öövaatluskaamerad tuvastavad soojuskiirgust või infrapunalampide poolt valgustatud teed ning kaamerapilt töödeldakse ning edastaks juhile nähtaval moel salongis asuvale ekraanile.

Kaamerasüsteemide puhul tuvastavad masinõppega treenitud algoritmid iga kaadri pealt reajooned, liiklusmärgid, foorid, sõidukid, jalakäijad, ratturid ja muud huvipakkuvad objektid ja nende asukoha ja kauguse auto suhtes või ka sõidetavad (vaba sõidutee) ning mittesõidetavad alad (kõnnitee, hooned, puud, põõsad jmt).
Ultraheliandurid saadavad välja kõrgsagedusheliimpulsse, mis objektidelt tagasipeegeldumise korral registreeritakse ning teades väljasaatmise ja vastuvõtmise aega saab heliimpulsi poolt läbitud vahemaa korral arvutada juhtmooduli poolt ka objektide kaugused. Ultraheliandurid on vähetundlikud erinevatele oludele, kuid samas on ka nende tööulatus suhteliselt väike (kuni 5 m).
Auto ümbritsevast keskkonnast ja soovitud sõidurežiimist tulenevalt kombineeritakse vastava juhiabisüsteemi väljundid sõiduki juhtimiseks ja/või juhi hoiatamiseks ja/või teavitamiseks.
Näiteks adaptiivse püsikiiruse hoidja puhul, kui on teada eesoleva sõiduki kaugus, selle suhteline kiirus, juhi poolt soovitud kiirus ja ka hoitav distants, kalkuleerib süsteem sobivaima kiirenduse (0 kui kiirust vaja hoida, + või – vastavalt hoo lisamise või vähendamise vajadusele), mida rakendatakse mootori ja jõuülekande juhtsüsteemide ning vajadusel ka pidurisüsteemi kaudu. Lisaks on tänapäevased adaptiivsed püsikiirusesüsteemid suutelised tuvastama ka eesoleva sõiduki paiknemise ning hoidma ka kurssi eesoleva auto järgi kurvides.
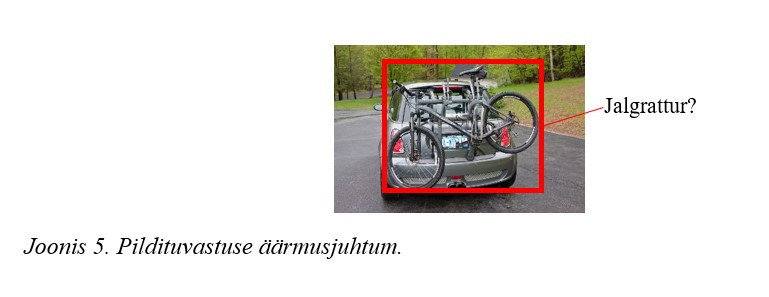
Masinõppe algoritmidega pildituvastus pole kunagi absoluutse täpsusega, vaid tulemused esitatakse tõenäosuse hindamisega, seega võib esineda veel kummalisi äärmusjuhtumeid, kus näiteks maanteel 90 km/h sõites eesoleva auto taha kinnitatud jalgratas tuvastatakse kui jalgrattur. Samas ei saa ka jalgratturite tuvastamist piirata, mis on oluline funktsioon linna ja -lähiümbruse liikluses osaledes.
Enamik juhiabisüsteeme ei ole ühe anduri põhjal töötavad, vaid erinevad süsteemid saavad oma sisendi mitme anduri teabe koostöös ning erinevad juhiabid võivad mõjutada samade täiturite tööd. Süsteemi tõrgete korral lülitatakse reeglina juhiabisüsteemid välja ning olenevalt tõrke raskusastmest võib piisata süsteemi taaskäivitamisest, anduri puhastamisest või siis on vaja pöörduda autoteenindusse. Näiteks on tihti esinev, kuid suhteliselt ohutu tõrge radari või kaamerate kattumine pori või lume või jääga ning seetõttu on nende töö ajutiselt piiratud kuni nende puhastamiseni.
Väga suureks põhimõttemuudatuseks autotehnikas on tulevikus eriti juhiabisüsteeme silmas pidades tarkvara roll paremate süsteemide pakkumisel kiire arendustsükliga. Autod saadavad tootja tehastele tagasi andmeid äärmussituatsioonidelt, näiteks kus juht pidi sekkuma juhiabisüsteemi töösse ning algoritme treenitakse uute andmetega ning uuendatud juhiabisüsteemi tarkvara saab laadida tervele mudelipargile korraga, ehk siis kõik sõidukid õpivad üksikute sõidukite poolt kogetud vigadest.
Kindlasti tasub meeles pidada ka seda, et praeguse seisuga pole ühegi autotootja pakutav sõiduk täieulatuslikult isejuhtiv ning kõikides sõiduolukordades vastutab sõiduki eest juht, ehk juhiabisüsteemi mittesihipärase kasutamise või isegi selle tõrgete ilmnemisel on ikkagi juht täielikult vastutav sõiduki juhtimise eest.
Juhiabisüsteemide lühiülevaade on valminud koostöös Tallinna Tehnikakõrgkooli juhtivlektori Henri Vennikasega.
Viimati uuendatud 26.05.2023
